[18] 자율주행차 제작
6일의 연휴가 주어져서, 집에서 한 번 해보았다.
DIYGO란?
DIYGO는 사용자의 목적에 맞추어, 다양한 형태의 모형을 제작하고,
해당 모형의 동작을 직접 코딩할 수 있는 교육용 로봇 kit 입니다.


인공지능 자율주행 자동차 만들기 과정은
DIYGO의 부품을 이용하여 8방위로 기동할 수 있는 모빌리티 현상을 만들고,
초음파센서와 카메라모듈 드으이 회로 부품을 이용하여
외부환경을 감지하며 주행할 수 있는 코딩활동을 진행하는 과정입니다.
DIYGO는 볼트와 너트를 사용해서 각종 프레임과 서포트를 조립하여
형상을 제작할 수 있습니다.

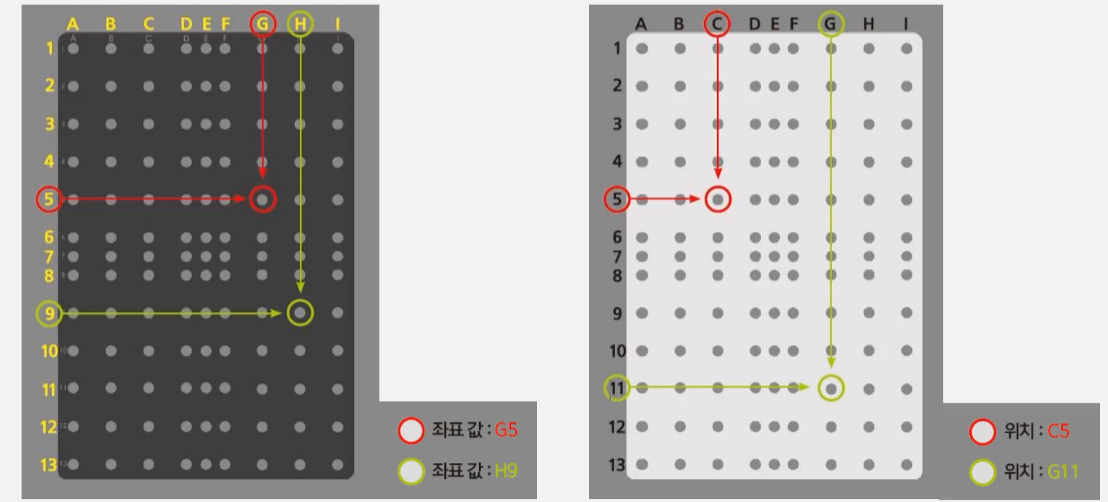
평면 프레임 부품에는 알파벳과 숫자를 조합한 좌표가 표기되어 있습니다.
볼트와 너트는 전용 공구를 통해서 다음과 같이 조립합니다.


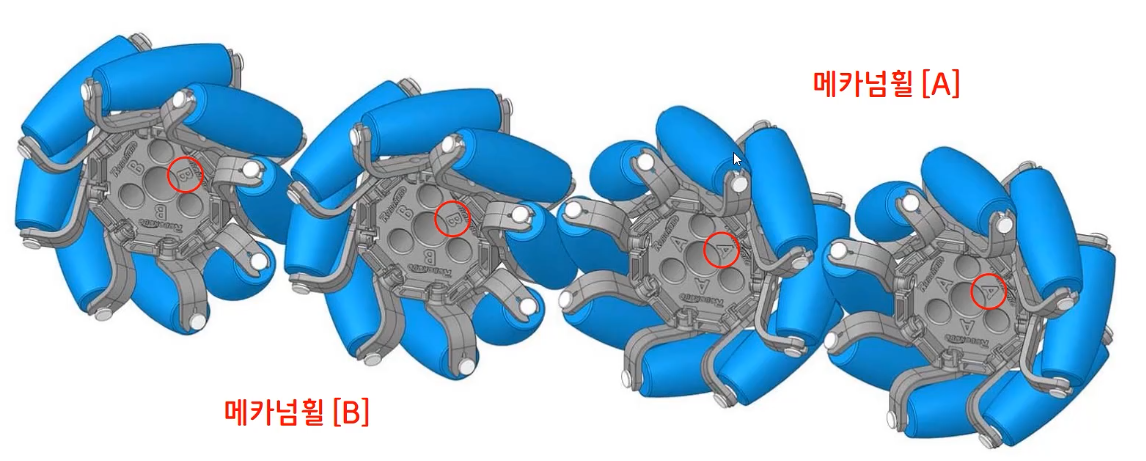
자율주행 자동차의 구동성을 높일 수 있는 메카넘휠을 조립할 수 있는 부품입니다.

메카넘휠은 [메카넘휠 바디 A]와 [메카넘휠 바디B] 로 조립된
4개의 바퀴가 모두 사용되어아 그 기능을 사용할 수 있습니다.
아래는 조립의 편의를 도와주는 전용부품들입니다.


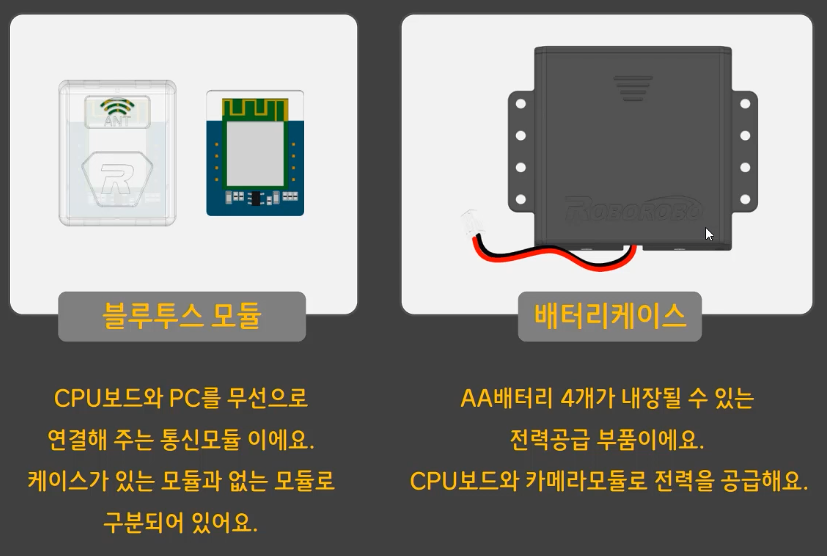
다음은 자율주행 자동차에 사용되는 회로부품입니다.


지금부터 아래 조립순서를 보고 조립해봅시다.



메카넘휠[A]를 조립합니다.




메카넘휠에 마카넘휠 가이드를 끼웁니다.




메카넘휠 타이어에 메카넘휠 축을 밀어 넣습니다.



메카넘휠에 메카넘휠 타이어를 밀어넣습니다.

---
이제 메카넘휠[B]를 조립해봅시다.
메카넘휠[A]와 같습니다.

https://www.youtube.com/watch?v=KI4S9yWIUSY
너트를 구멍에 집어넣어야 한다. 이걸 몰라서 반대로 조립했다가 4개의 바퀴 모두 해체하고 다시 체결했다능



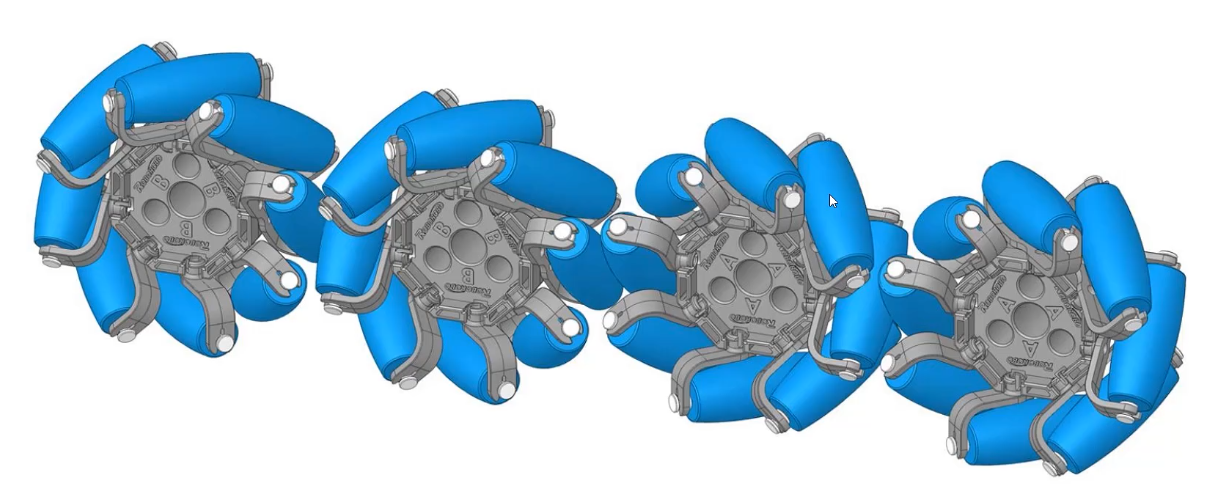
메카넘휠 [A] [B] 조립이 완성되었습니다.

이제 본체를 조립해보겠습니다.



CPU 보드를 서포트에 조립합니다.


이제 DC모터에 모터프레임을 조립합니다.


모터 2개를 빅 메인프레임에 조립합니다.



나머지 2개의 모터도 빅 메인프레임에 조립합니다.

마지막으로, 빅 메인프레임에 바퀴를 조립합니다.
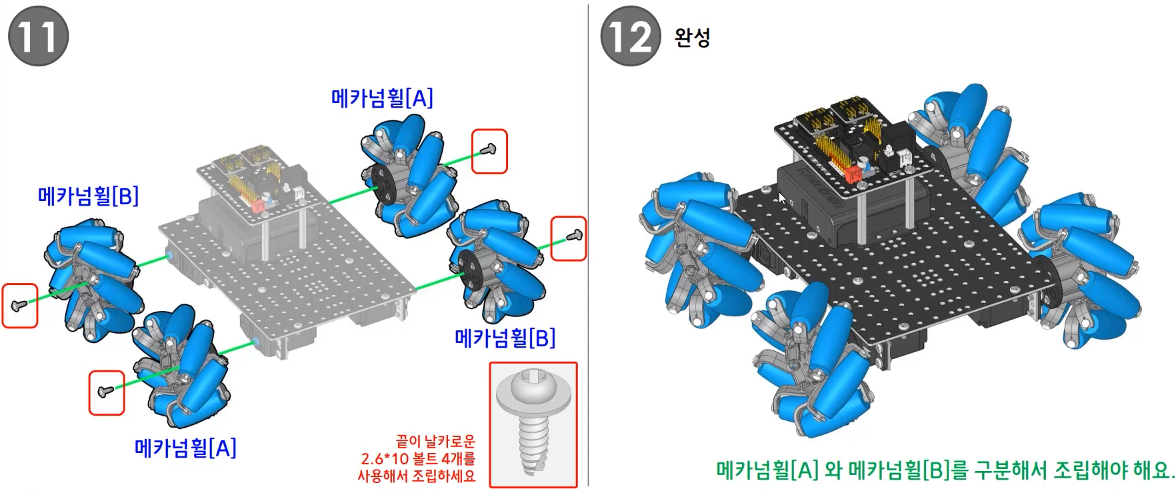













완성!
후루츠링 맛있다.
비가 와서 계란팽이버섯전이랑 호박전을 만들었다. 양 조절 실패했는데 다행히 거의 다 먹었다는. (꿀)


